наши продукты
Машинное обучение. Авторская разработка фреймворк Fluctio Sim
Мы разработали среду для тренировки и программирования роботов с помощью машинного обучения в Unity 3D. (Свидетельство о регистрации ПО для ЭВМ № 2024613559). Это выгоднее, эффективнее и быстрее классического программирования или перепрограммирования роботов.
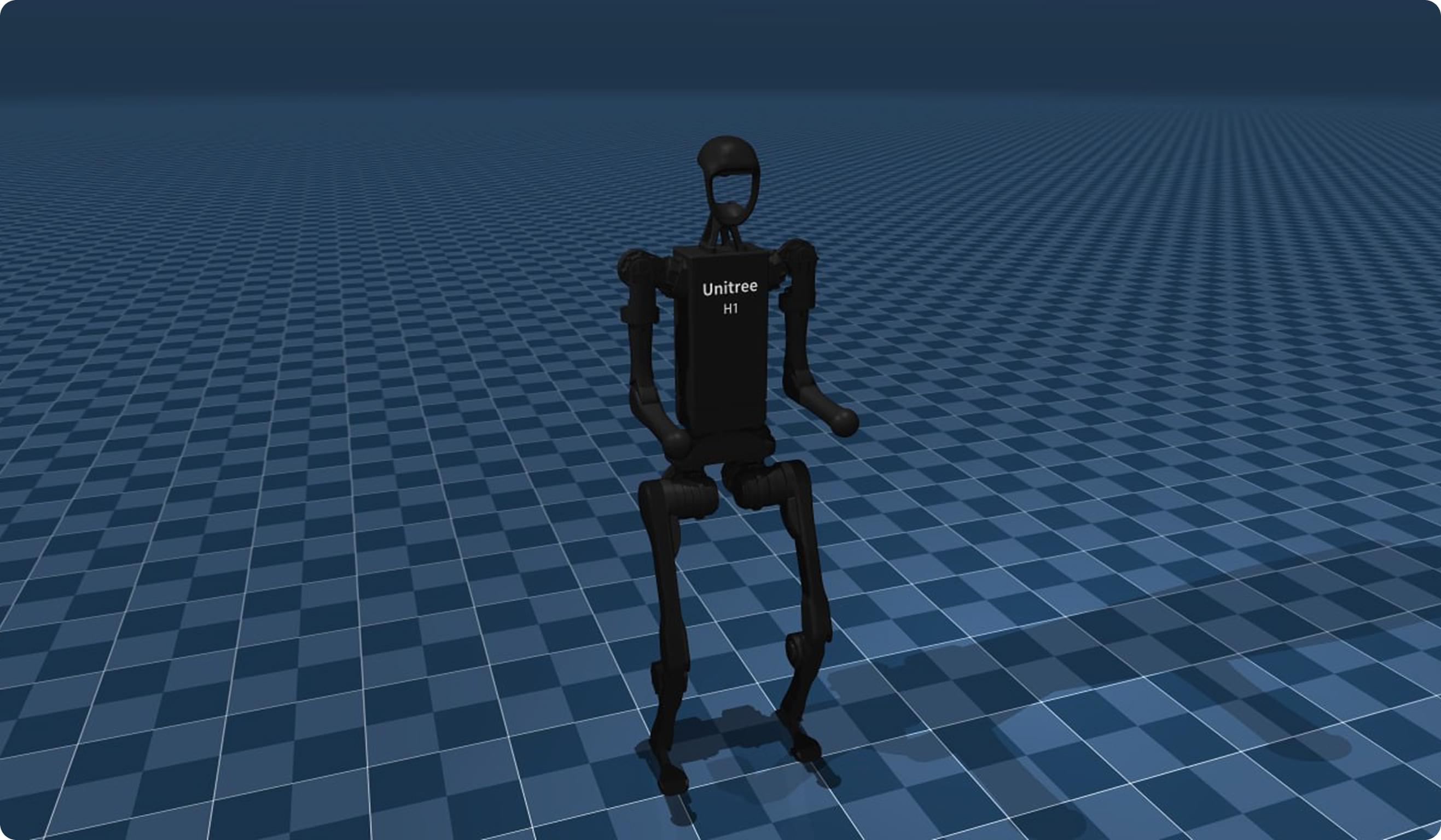
Цифровые двойники в среде симуляции учатся точным движениям, адаптируются к новым действиям и приходят к безошибочному алгоритму.
Цифровые близнецы проводят миллионы виртуальных часов в симуляторе и обучаются самостоятельно без участия человека.
Размноженные виртуальные копии позволяют оптимизировать развитие навыков робота-оригинала и сократить время на обучение. Обновленный софт бесшовно переносится в робота.
Примеры наших готовых решений:
Для производителей автоматических управляемых тележек - сервис «sim2real» - от моделирования к реальности

Для производителей роботов-сборщиков для мелкосерийного производства

Для разработчиков и производителей роботов-курьеров (последняя миля)

Ровер “Сверчок”. Умный робот на колесах, управляемый ИИ.
Мы разработали многофункциональную колесную роботизированную платформу.
Ровер приспособлен к повышенной грузоподъемности и длительному времени автономной работы. Обладает независимой подвеской и функционирует как внутри помещений, так и на открытых пространствах. Уникальное преимущество нашего робота – собственная методика машинного обучения под ваши задачи.
Благодаря эффективному машинному обучению роботы могут работать сообща между собой, а также с другими типами роботов (коллаборативными, промышленными, антропоморфными и др.) в едином комплексе.
Характеристики:

Где помогут роботы роверы?
Робот-доставщик. Транспортировка грузов.

Сервисный робот. Робот-помощник в сельском хозяйстве.

Робот-помощник в поисковых работах

Лабораторный робот-маятник. Обучение студентов. Поддержка профессий будущего.
Поворотный обратный маятник можно использоваться как наглядное учебное пособие по теории управления, машинному обучению, робототехнике.
Разработан наиболее компактный и недорогой вариант, который можно тиражировать в школах, университетах, (отправляем презентацию пользователям фреймворка по запросу или сделать здесь ссылку на скачивание презентации).
Fluctio Inverted Pendulum - первый проект из коллекции Fluctio Ark - готовых робототехнических наборов для получения базовых знаний в Reinforcement Learning и sim-to-real переносе моделей в железо.
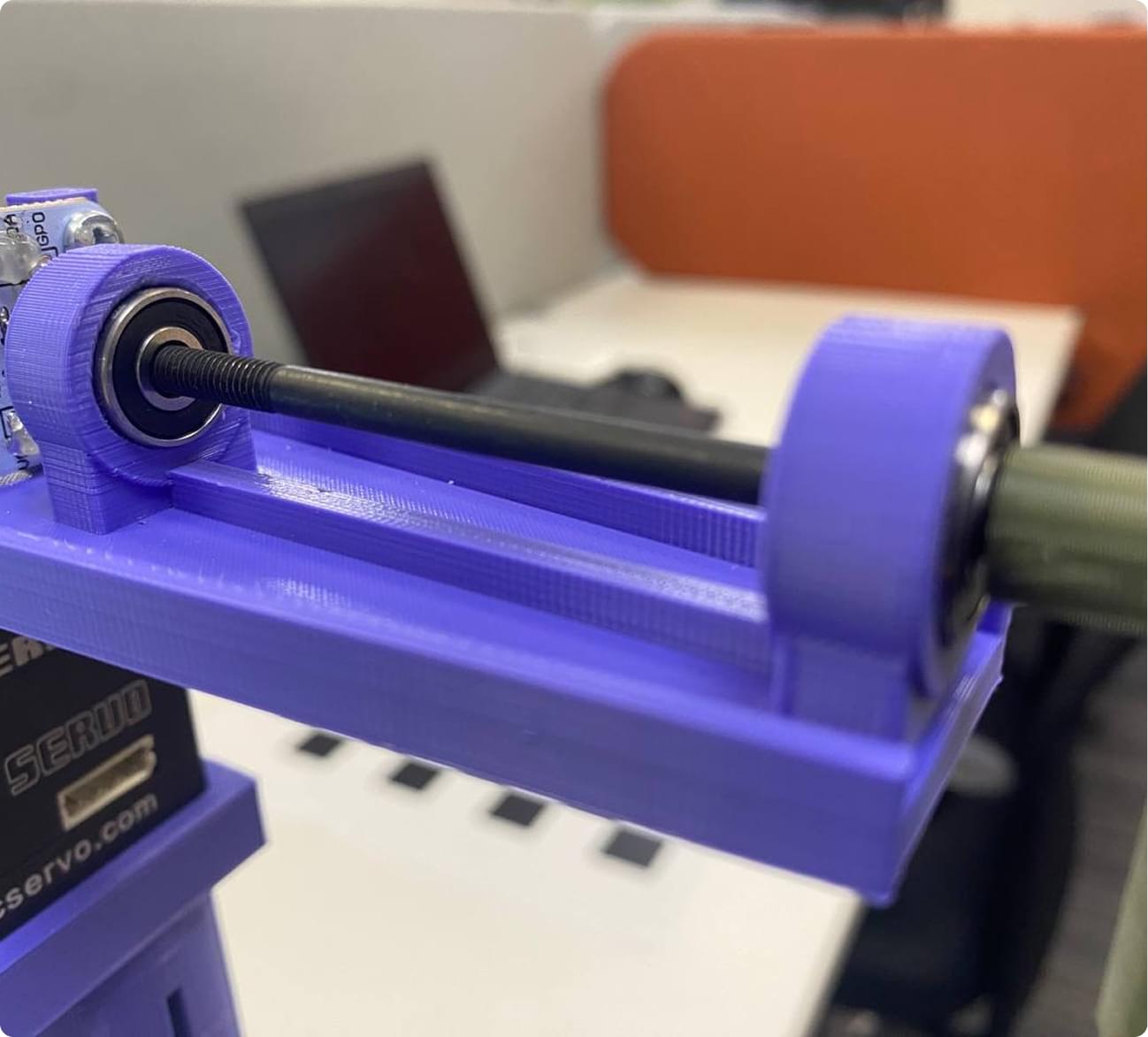
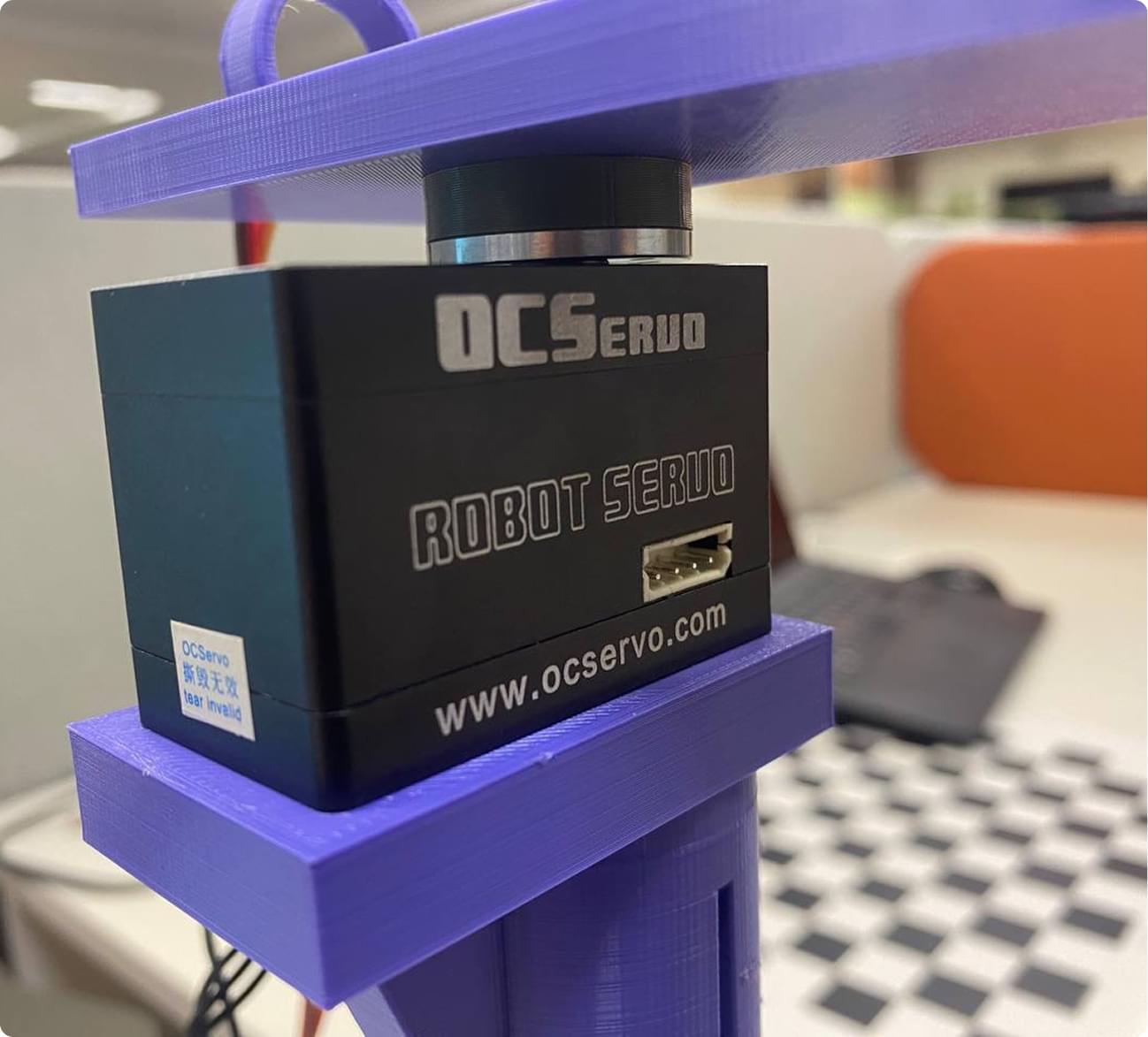
Сделан из доступных компонентов и 3Dпечатных элементов, которые можно распечатать самостоятельно. Все CAD модели и схемы подключения доступны open-source, так же как и предобученные модели balancer (для балансирования маятника) и calmer (для успокоения маятника из любого состояния).
Наше взаимодействие: Вы используете по подписке наше программное обеспечение
Кроме того, у маятника есть точный цифровой двойник в симуляторе Fluctio Sim, и обучающий туториал, в котором рассказывается о том, как легко собрать цифрового двойника и натренировать навык.
Машинное обучение. Авторская разработка фреймворк Fluctio Sim
Мы разработали среду для тренировки и программирования роботов с помощью машинного обучения в Unity 3D. (Свидетельство о регистрации ПО для ЭВМ № 2024613559). Это выгоднее, эффективнее и быстрее классического программирования или перепрограммирования роботов.
Цифровые двойники в среде симуляции учатся точным движениям, адаптируются к новым действиям и приходят к безошибочному алгоритму.
Цифровые близнецы проводят миллионы виртуальных часов в симуляторе и обучаются самостоятельно без участия человека.
Размноженные виртуальные копии позволяют оптимизировать развитие навыков робота-оригинала и сократить время на обучение. Обновленный софт бесшовно переносится в робота.
Примеры наших готовых решений:
Для производителей автоматических управляемых тележек - сервис «sim2real» - от моделирования к реальности
Для производителей роботов-сборщиков для мелкосерийного производства
Для разработчиков и производителей роботов-курьеров (последняя миля)
Ровер “Сверчок”. Умный робот на колесах, управляемый ИИ.
Мы разработали многофункциональную колесную роботизированную платформу.
Ровер приспособлен к повышенной грузоподъемности и длительному времени автономной работы. Обладает независимой подвеской и функционирует как внутри помещений, так и на открытых пространствах. Уникальное преимущество нашего робота – собственная методика машинного обучения под ваши задачи.
Благодаря эффективному машинному обучению роботы могут работать сообща между собой, а также с другими типами роботов (коллаборативными, промышленными, антропоморфными и др.) в едином комплексе.
Характеристики:
Где помогут роботы роверы?
Робот-доставщик. Транспортировка грузов.
Сервисный робот. Робот-помощник в сельском хозяйстве.
Робот-помощник в поисковых работах
Лабораторный робот-маятник. Обучение студентов. Поддержка профессий будущего.
Поворотный обратный маятник можно использоваться как наглядное учебное пособие по теории управления, машинному обучению, робототехнике.
Разработан наиболее компактный и недорогой вариант, который можно тиражировать в школах, университетах, (отправляем презентацию пользователям фреймворка по запросу или сделать здесь ссылку на скачивание презентации).
Fluctio Inverted Pendulum - первый проект из коллекции Fluctio Ark - готовых робототехнических наборов для получения базовых знаний в Reinforcement Learning и sim-to-real переносе моделей в железо.
Сделан из доступных компонентов и 3Dпечатных элементов, которые можно распечатать самостоятельно. Все CAD модели и схемы подключения доступны open-source, так же как и предобученные модели balancer (для балансирования маятника) и calmer (для успокоения маятника из любого состояния).
Наше взаимодействие: Вы используете по подписке наше программное обеспечение
Кроме того, у маятника есть точный цифровой двойник в симуляторе Fluctio Sim, и обучающий туториал, в котором рассказывается о том, как легко собрать цифрового двойника и натренировать навык.





